在上一节(1.1 神经网络骨架)中,我们见识了神经网络的底层引擎:神经元负责感知与扭曲,反向传播(链式法则)负责将损失分发定罪。
但这只是图纸上的理想状态。 一旦你真的把层数堆到几十重、塞进上千万条数据,这头名为“梯度下降”的猛兽就会彻底失控:
- 步子迈大了,它在山谷里疯狂震荡(不收敛);
- 步子迈小了,训练慢得让人;
- 层数太深,后方的“指责信号”根本传不到前线(梯度消失);
- 它还喜欢投机取巧,死记硬背训练集的答案(过拟合)。
本节将介绍深度学习发展史上,那几项挽狂澜于既倒的纯工程黑科技。
1. 教练的进化:优化器 (Optimizer)
既然“反向传播”算出了方向(梯度),也知道了错在哪(Loss),怎么改才能让 Loss 稳健缩小? 这就需要优化器控制下山的步伐,其中最具决定性的参数就是学习率(Learning Rate)。
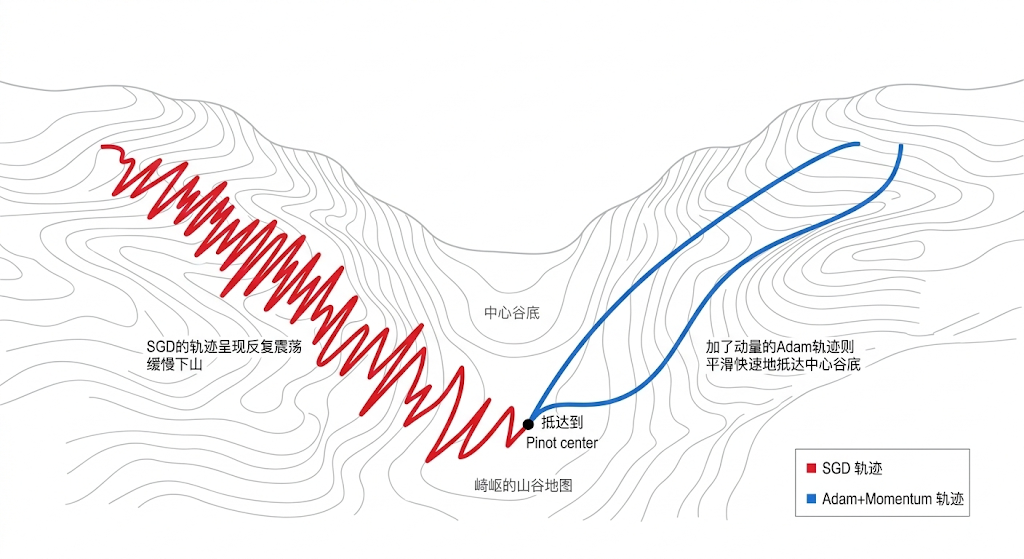
1.1 开山鼻祖:SGD(随机梯度下降)
最朴素的逻辑,看见坡就下,朝最陡的方向走固定的一定步子。
- 致命弱点:如果遇到一个狭长的山谷,由于坡度陡但其实谷底在沿长轴方向,SGD 会在山谷两壁上疯狂反复横跳(震荡),迟迟不敢走向真正的谷底。
1.2 加上惯性:Momentum
物理学给了工程师灵感:给下山的小球加上动量(惯性)。
- 原理:如果连续几次都在朝东边走,那下次跨步时就把往东的步伐加大;如果一会儿往南一会儿往北,南北的幅度就会被惯性抵消。
- 效果:它极大地缓解了 SGD 的无脑震荡,像一辆安装了悬挂系统的越野车。
1.3 现代标配与 LLM 御用:Adam 与 AdamW
既然方向可以加惯性,那不同维度的学习步长能不能因人而异? 如果在某一个参数维度上地形非常平坦,那就步子迈大点;如果某一个维度崎岖,就自动把学习率降低。
这就�是 Adam (Adaptive Moment Estimation):目前绝大部分深度学习模型的默认优化器。
- AdamW:由于 Adam 在最后对抗“过拟合”的数值衰减上存在一个隐秘的代数 bug。研究人员修复了这个 bug 提出了 AdamW,它同时拥有自适应步长极速收敛的优势,又能让模型泛化能力更强。目前所有的大语言模型(LLM,包括 LLaMA、GPT等)一开场,优化器必填 AdamW。
1.4 P2 前沿:Lion 优化器
寻找最优解的算力成本越来越高,Google 近年提出了极简的 Lion。 如果不算精确梯度的具体数值,**只看梯度的“符号(正负号)”**呢?只要知道向左还是向右,闭着眼睛猛冲就行了。不仅霸道,更是被证明比 Adam 还能节省显存。
2. 驯服过拟合:正则化与 Dropout
AI 也喜欢“死记硬背历年模拟卷(训练集)”,到了“真正的考场(测试集)”就翻车,这叫过拟合。 参数越多,模型背答案的能力越强。
Dropout(随机失活)
这是深度学习史上最简单、也最天才的发明之一: 在训练时�,随机拔掉一部分神经元的网线(比如 30%)。
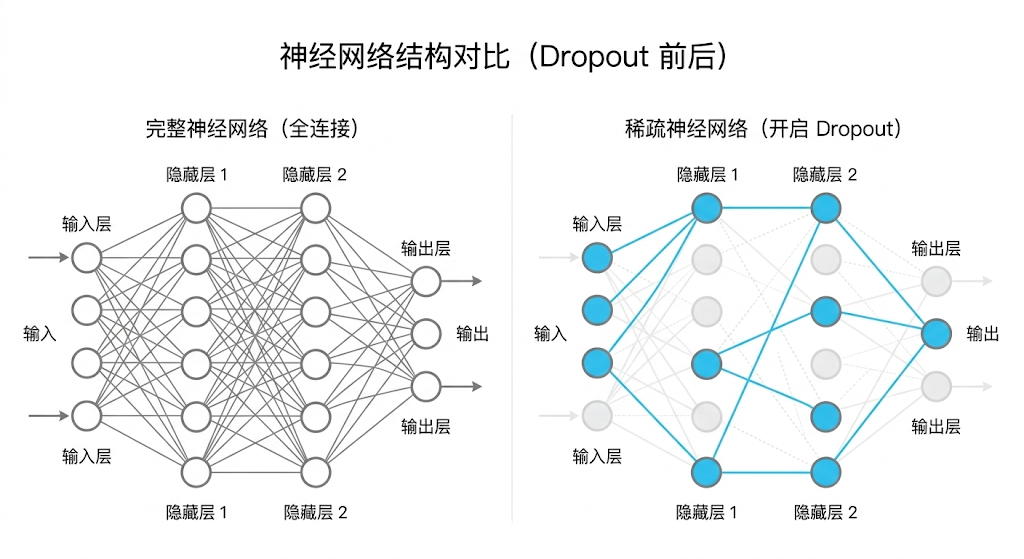
- 为什么会有用? 如果一个公司里总有 30% 的人随时会旷工,为了保证项目正常交付,大家就不能搞单点依赖,每个人都得学点真本事,独立承担任务。 这逼迫神经网络里的每一个节点,不能依靠前面特定的几张面孔来投机取巧,必须各自去提取真正通用、抗干扰的特征。
# PyTorch 中一行代码搞定
import torch.nn as nn
self.dropout = nn.Dropout(p=0.3) # 30% 的概率摸鱼
黄金法则:千万记住!Dropout 只在训练时开启。等真正上线考试(推理预测)时,要恢复所有的神经元全量出击。
3. 把网络推向深渊再捞起来:残差连接 (ResNet)
在 2015 年前,哪怕再有钱、算力再高,没人敢把神经网络叠到 20 层以上。 因为存在死穴:梯度消失。 根据链式法则,小于 1 的导数连乘 20 次,到最前面的浅层时梯度已经接近无限小。浅层网络根本收不到指令,形同瘫痪。
2015年何凯明提出的 残差网络(ResNet),打破了深度学习的天花板,一举将网络推上了 150+ 层。
黄金跳跃(Skip Connection)
做法粗暴:如果你在后面几层可能什么都学不到,那我就在这个模块旁边直接修一条**“高速公路”**,把原始的输入原封不动地“跨层相加”到后面。
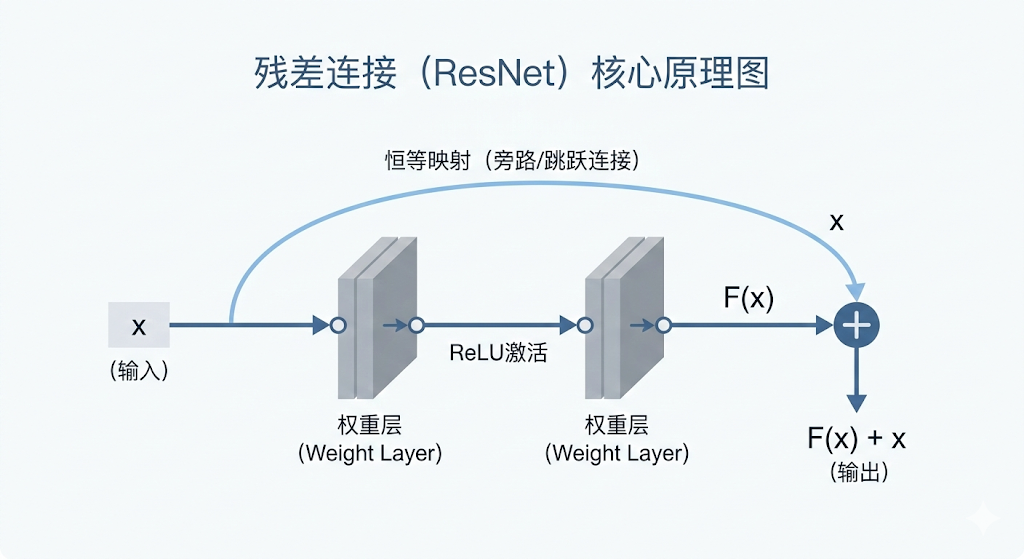
- 容错率极高:哪怕中间那一坨
Network(x)彻底训烂了输出为 0,最坏也就是把输入原样透传。 - 梯度高速公路:在反向传播时,如果通过神经元那条路梯度消失了,损失信号可以沿着这条 "+" 号的直连通路,光速、毫无折损地直达网络的前线!
Transformer 为什么能叠 96 层甚至更多?它的骨架深处,依然铭刻着残差连接的烙印。
4. 数据也要排队洗澡:归一化 (Normalization)
除了把梯度传回去,数据在往前输送的过程中也会出事。
试想一条流水线,第一层神经元把输出放大到了 1000,第二层神经元却习惯处理 -1 到 1 的数字,第二层当场罢工(这就叫内部协变量偏移)。 所以我们要强制在两层之间设一道海关:把过来的数字,强行捏回均值为 0,方差为 1 的标准正态分布。
4.1 BatchNorm (批归一化,图像时代的王)
- 原理:一次抓一堆数据(一个 Batch),计算这堆数据里某一个特征列的均值和方差,�强行抹平他们的尺度。
- 结局:它是 CNN 训练极速起飞的核心功臣。但由于它太依赖“同一批抓到的数据”(如果每一批长短不一,它就懵了),因此在自然语言处理里遭到了淘汰。
4.2 LayerNorm (层归一化,语言时代的基石)
在自然语言领域,一句话可能有 5 个词,另一段话有 50 个词。“跨句子横着算”完全行不通。
- 原理:LayerNorm 改成了**“竖着对单句话”**内部所有维度的特征自己求均值和方差。
- 地位:它是 Transformer 的命脉。没有 LayerNorm,注意力机制的数字会瞬间爆炸成
NaN。
4.3 极限精简:RMSNorm
既然只是想要平滑尺度,我们有必要严格计算“均值”吗? RMSNorm (均方根归一化) 一脚踢开了大模型减均值的计算步骤,仅保留方差。 牺牲了可以忽略不计的一丁点表现,换来了肉眼可见的提速——今天你叫得上名号的开源多模态与语言模型(如 LLaMA、Qwen全系),用的全部都是 RMSNorm。
5. 总结与路线串联
- 控制步幅(优化器):从 SGD 到当红顶流 AdamW,旨在不震荡、不停滞地驶入山谷。
- 防止死记硬背(正则化):Dropout 让部分神经元失活,逼迫整体提取有用通用特征。
- 冲破深度极限(残差连接):无损的高速公路传递,让百层乃至千层网络的反向传播成为可能。
- 稳定信号传输(归一化):从大锅饭的 BatchNorm 到专门伺候变长序列的 LayerNorm/RMSNorm,确保层与层不发生量级代差。
现在,无论它是深陷欠拟合的泥潭,还是濒临过拟合的悬崖,无论是横跨 100 层的深渊还是面对不平滑曲面,你都已经给这个叫“多层感知器”的裸体机甲,挂载了全套的生存装备。
但这套骨架还缺一样东西: 它没有专门的定制器官。 当它被投入名为“像素”与“图像识别”的绞肉机里时,由于没有专门的结构(全连接的参数实在太多了),它将彻底被显存压垮。
我们需要为它换上特殊的机械臂。 下一�章,我们将介绍一种专门利用“探照灯与局部手电筒”席卷视觉时代的网络器官——CNN 卷积层。
下一章: 1.3 CNN卷积网络
加载评论中...